물리학 실험 1-4
1-4. 자이로스코프
*본 보고서는 이미 제출된 적 있는 보고서로 표절 시 발각될 확률이 높으니 참고만 해주시길 바랍니다.
참고: http://physlab.snu.ac.kr/documents/manual/Ko/1-4.pdf
1. Introduction
1.1. 실험 목적
토크와 각운동량을 이해하고, 자이로스코프의 세차 운동을 관측한다.
1.2. 배경 지식
1.2.1 토크와 각운동량
토크  에 대해서,
에 대해서,
또, 회전 운동의 물리량인 각운동량  에 대하여,
에 대하여,
이를 시간에 대하여 미분하면,
그리고,  이므로
이므로
이를 벡터식으로 표현하면,
1.2.2 세차운동

그림 1 회전 장치
그림 1과 같이 회전하는 장치가 있다고 하자. 이 바퀴가 회전하지 않을 경우, 중력에 의한 토크가 작용하여 초기에  이었던 각운동량을 변화시킨다. 그래서 회전바퀴가 아래로 떨어지는 모습을 보인다.
이었던 각운동량을 변화시킨다. 그래서 회전바퀴가 아래로 떨어지는 모습을 보인다.
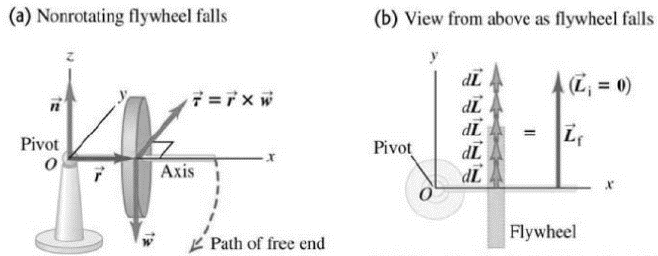
그림 2 회전 바퀴가 돌지 않는 상태에서의 모습
반면, 회전 바퀴가 회전하고 있던 상태에서 중력의 영향에 놓이게 되면, 중력에 의한 토크  가 각운동량에 수직하게 작용하여 각운동량을 변화시키는데, 각운동량의 끝점은 원을 그리게 된다. 이 때문에 회전바퀴가 낙하하지 않고 정점 주변을 원을 그리며 움직이게 된다.
가 각운동량에 수직하게 작용하여 각운동량을 변화시키는데, 각운동량의 끝점은 원을 그리게 된다. 이 때문에 회전바퀴가 낙하하지 않고 정점 주변을 원을 그리며 움직이게 된다.

그림 3 회전 바퀴가 돌 때의 모습
w가 회전 바퀴의 무게이고, r이 세차운동의 회전축에서부터 회전 바퀴 사이의 거리라고 할 때, 회전바퀴가 움직이는 세차 각속도  에 대하여,
에 대하여,
실험에서는 다음 식을 쓴다.
여기서 M은 무게추의 질량, R은 축이 고정된 점에서부터 무게추 사이의 거리이다.
1.2. 실험 안내
1.2.1 설정 과정
자이로스코프 장치에 전원을 연결하고, RS232-USB 케이블을 사용하여 실험 장치를 컴퓨터에 연결한다. SensorLAB을 설정하고, Connect 버튼을 눌러 장치와 통신이 잘 이루어지는지 확인한다. 좌표계를 설정하는 등 나머지 설정을 마친다.
1.2.2 세차운동-세차 각속도 측정
설정을 마치고, 자이로스코프 장치의 수평을 맞춘다. 균형추를 수평회전축 끝에 고정하여 회전축을 기울어진 상태로 만들고, 수직중심축이 회전하지 않는 상태가 되도록 A형 베이스의 수평 조절볼트를 조절한다. 그리고 균형주의 위치를 조정하여 자이로스코프 장치가 토크 평형 상태가 되도록 조절한다.
이제 줄의 고리를 관성 도르래 핀에 걸어 감고, 부드럽게 당겨 바퀴를 회전시킨다. 무게추 100g을 회전축 가장 안쪽 거치대에 끼운다.
자이로스코프가 장동 운동을 할 텐데, 회전축을 손끝으로 살짝 잡고, 장동 운동을 일으키지 않도록 부드럽게 밀어준다.
자이로스코프가 수평 평면 상에서 세차 운동만 하도록 조건이 구비되면, 데이터 측정을 한다.
실험을 두 번 하고, 무게추를 200g짜리로 바꾸어 다시 두 번 실험을 진행한다.
2. Data & Result
2.1. 100g 무게추
100g의 무게추로 세 번 실험을 진행하였다.
세차 각속도를 잴 때에는 두 시각에 측정한 세차 운동 결과값의 시간에 대한 평균값을 이용하여 구하였다.  에서 Rotation이
에서 Rotation이  사이를 움직인다면, 평균 세차 각속도
사이를 움직인다면, 평균 세차 각속도  는 다음과 같이 나타낼 수 있다.
는 다음과 같이 나타낼 수 있다.
그리고 이를 이론적으로 구한 값과 비교하기 위해 다음을 이용하였다. 회전 바퀴의 반지름이 0.128m, 회전 바퀴의 질량이 대략 1.337kg이므로, 회전 바퀴의 관성 모멘트는 다음과 같다.
이때, 추의 질량이 0.1kg이고, 축이 고정된 점에서부터 무게추 사이의 거리가 0.15m이므로,
두 시각에서 측정한 각속도의 평균값을 rad/s로 변환시킨 값을  에 대입하도록 한다.
에 대입하도록 한다.
이렇게 했을 때 그 결과를 그래프로 나타내려고 하였다. 그러나 그 값이 매우 작은 시간 안에 진동하는 형태를 보이는 경우가 많아 분석하기가 매우 어려웠다. 그래서 0.5초 간격 동안의 세차 각속도 평균을 내어 그래프에 표기하기로 했다.
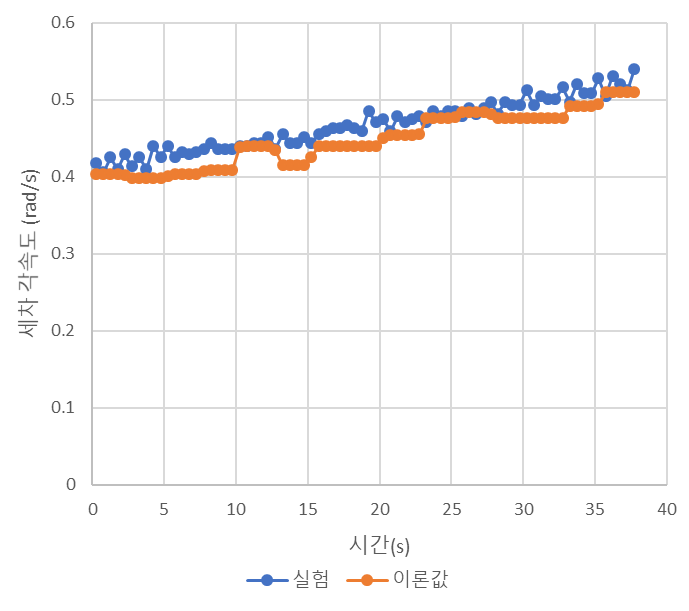
그림 4 실험 1-1 결과
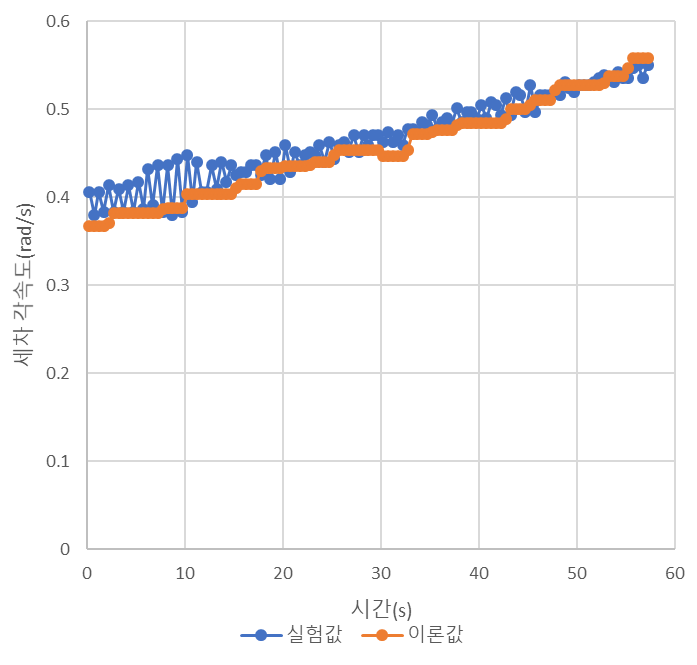
그림 5 실험 1-2 결과

그림 6 1-3 실험 결과
다음과 같이 시간에 따라 각속도가 변화하는 모습을 보이기 때문에, 세차 각속도를 어떤 특정한 값이라고 말하기는 힘들다.
2.2. 200g 무게추
200g짜리 무게추로도 같은 방법으로 실험을 세 번 진행하였다. 같은 방법으로 결과를 산출하였고, 그 결과를 그래프로 나타냈다.
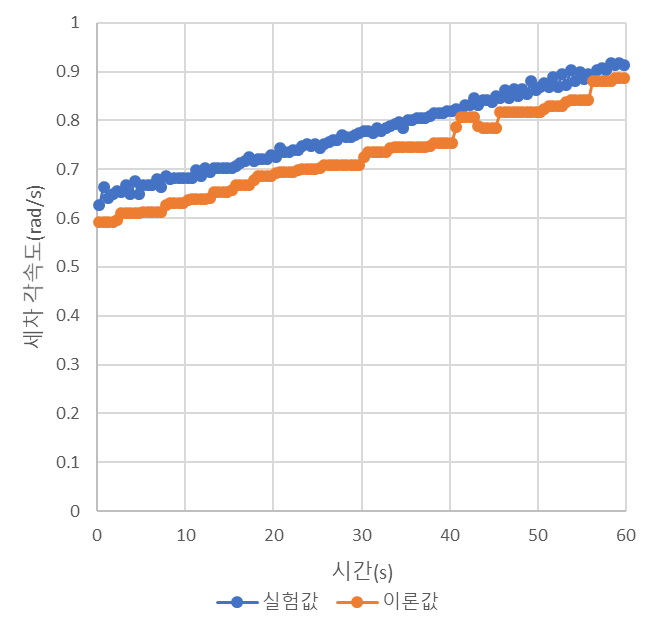
그림 7 2-1 실험 결과

그림 8 2-2 실험 결과

그림 9 2-3 실험 결과
2.3. 일치율
위의 실험에서 이론값에 대한 실험값의 비, 즉 를 얻어냈다. 실험값/이론값을 구해 표로 나타내면 다음과 같다.
1-1
|
1-2
|
1-3
| |
비율(%)
|
104.3333
|
102.6611
|
101.1327
|
표 1 실험 1에서의 비율
2-1
|
2-2
|
2-3
| |
비율(%)
|
106.5363
|
106.3895
|
101.4167
|
표 2 실험 2에서의 비율
3. Discussion
실험 데이터에서 오차를 일으킬 수 있는 원인이나 데이터를 해석해야 할 때 고려해야 할 요소들에 대해 토의해보도록 한다.
3.1. 장동 운동의 영향
데이터를 보았을 때 Tilt 값이 진동하는 등 자이로스코프 장치가 완전하게 수평 평면 상에서 세차 운동을 하지 못하고, 회전 바퀴가 위아래로 움직이는 것을 볼 수 있었다. 이것이 데이터에 어느 정도 오차를 일으킬 수 있다.
3.2. 자이로스코프의 균형
사람의 한계로 인해 자이로스코프 장치의 균형을 완전히 맞추지 못했을 가능성도 남길 수 있다.
3.3. 공기 저항 등의 요소
자이로스코프가 공기 저항 등의 힘 때문에 제 역할을 다하지 못했을 가능성이 있다.
4. Conclusion
실험을 통해 세차 운동의 모습이 이론과 얼마나 잘 맞아 떨어지는지 확인해 보았다. 실험 1과 실험 2에서 각각 다른 크기의 토크를 주며 실험하였다. 결과적으로 실험을 통해 얻은 값과 이론을 통해 얻은 값이 어느 정도 큰 유사도를 보임을 얻어낼 수 있었다.
전체적으로 실험을 통해 얻은 값이 이론을 통해 얻은 값보다 약간 큰 모습을 보였으나, 이론값에 대한 실험값의 비율 퍼센트가 모두 100%에서 10% 밖으로 벗어나지 않았다. 각각 실험에서 어떤 데이터들은 101% 비율을 보이는 등 큰 유사도를 보이기도 했다. 그래프를 통해 확인해 보았을 때에도 실험 값이 이론 값에서 크게 벗어나지 않는다는 것을 확인할 수 있었다.
그래프를 보면, 실험값이 증가하는 것을 뚜렷하게 확인할 수 있다. 데이터를 보았을 때 디스크, 즉 회전 바퀴의 각속도 크기가 감소하는 것을 확인할 수 있었는데, 세차 각속도와 회전 바퀴의 각속도는 반비례하므로, 회전 바퀴의 각속도 크기의 감소가 세차 각속도의 증가를 일으켰다고 생각할 수 있다. 회전 바퀴 각속도 크기 감소에 의해 값이 증가한 이론 값 그래프의 양상(혹은 기울기)과 실험 값 그래프의 양상이 비슷한 것을 보았을 때 이 추론이 타당하다고 생각한다. 회전 바퀴의 각속도 크기가 감소한 원인으로는 마찰력을 꼽을 수 있었다. 회전 바퀴와 축 사이의 마찰력이나 회전 바퀴와 공기 사이의 마찰이 회전 바퀴의 각속도 크기를 감소시켰다고 추측할 수 있었다.
이 실험에서 오차가 발생했다면 그 원인이 무엇일지도 분석하였다. 우선, 자이로스코프 장치가 완벽하게 수평 평면 상에서 세차 운동을 하지 않고 미세하게 위 아래로 흔들리는 모습을 보인 것을 데이터의 오차 원인으로 지목하였다. 두 번째로, 완벽하지 않은 자이로스코프의 균형, 또는 평형을 데이터의 오차 원인으로 지목하였다. 세 번째로, 공기 저항이나 마찰력 등의 외부 힘을 데이터의 오차 원인으로 지목하였다.
다음과 같은 오차 원인에도 불구하고 표 1과 표 2, 그리고 그래프에서 보인 것과 같이 실험 값과 이론 값이 큰 유사도를 보이는 것을 보아, 이 실험을 통해 이론의 정확성을 어느 정도 확인할 수 있었다고 결론을 내릴 수 있었다.
* Reference
1 서울대학교 물리천문학부, 『실험 1-4. 자이로스코프』, 2015, 15