물리학 실험 1-2
1-2. 관성모멘트 측정
*본 보고서는 이미 제출된 적 있는 보고서로 이를 표절해서 제출하면 무조건 F를 받을 것입니다. 참고용으로만 쓰십시오.
참고: http://physlab.snu.ac.kr/newphyslab/lab/newmoment.pdf
1. Introduction
1.1. 실험 목적
① 물체를 회전 장치를 통한 중력의 일정한 힘으로 회전시키고, 낙하하는 추의 가속도를 이용하여 물체의 관성모멘트를 구한다.
② 회전 반경과 관성모멘트, 평행축 정리 등의 이론을 실험을 통해 확인하고, 회전 운동과 토크의 관계를 실험적으로 확인한다.
1.2. 배경 지식
1.2.1 강체
그 계에 속하는 입자가 항상 상호 간 같은 상대적 위치를 유지한 물체를 말한다.
강체가 직선 운동을 할 경우, 물체의 질량이 관성의 역할을 하고, 강체가 회전 운동을 할 경우, 관성 모멘트가 관성의 역할을 한다.
1.2.2 강체의 관성모멘트
강체의 각속도가  일 때, 총 운동에너지
일 때, 총 운동에너지  는,
는,
이때,  를 관성 모멘트라고 한다. (
를 관성 모멘트라고 한다. ( 는 회전축으로부터의 거리) 강체에서 연속적 질량 분포가 이뤄질 경우,
는 회전축으로부터의 거리) 강체에서 연속적 질량 분포가 이뤄질 경우,
1.2.3 구체적인 상황에 대하여
그림 1과 같은 실험 장치를 구성한다고 하자. 이때, 추는 가속도  로 자유낙하하고 있고,
로 자유낙하하고 있고,  를 회전 장치의 각가속도라고 하며, 회전 장치의 시간에 따른 회전각을
를 회전 장치의 각가속도라고 하며, 회전 장치의 시간에 따른 회전각을  라고 하자. (단,
라고 하자. (단,  일 때
일 때 
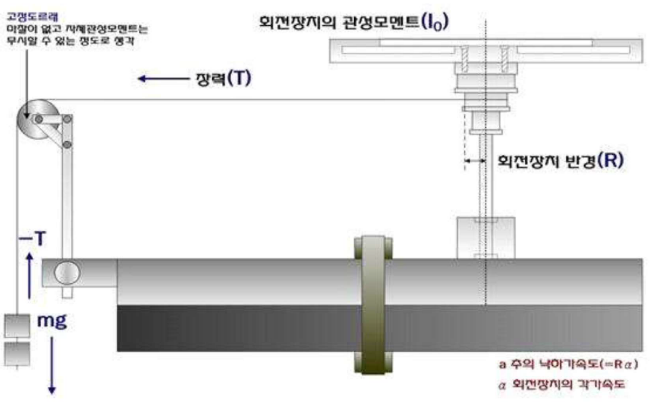
그림 1: 관성모멘트를 측정하는 실험 장치
추의 운동에 대해 다음과 같이 기술할 수 있다.
회전 장치에 작용하는 토크와  와 에 대해,
와 에 대해,
(이때,  )
)
1.2.4 여러 가지 경우의 관성모멘트
가로, 세로가 각각  인 직사각형 판의 경우,
인 직사각형 판의 경우,
반경이  , 높이가
, 높이가  인 원기둥의 경우,
인 원기둥의 경우,
두루마리 휴지처럼 구멍 뚫린 기둥의 경우,
반지름이 R인 구의 경우,
1.3. 실험 안내
1.3.1 실험 1
버니어캘리퍼스를 이용하여 실험 장치 중 실이 감긴 기둥의 회전 반경을 재고, 시료 중 원판의 반경과, 원환의 내부 반경 (구멍의 반경)과 외부 반경 (전체 반경)을 측정한다. 그리고 전자저울로 추와 시료들의 무게를 잰다.
1.2.3의 그림 1처럼 실험 장치를 테이블에 설치하고, 추에 묶인 실이 회전판과 평행이 되도록 조정하여 고정한다. 실의 길이는 바닥에 닿지 않도록 한다.
스탠드를 이용하여 카메라가 추가 낙하하는 모습을 캡처할 수 있도록 한다. 이때, 추가 낙하하는 배경을 위해 테이블의 가장자리에 흰 종이를 부착한다. I-CA로 좌표계 설정 등을 마치고, 추가 낙하하는 모습을 캡처한다. 그리고 프로그램을 통해 캡처 자료를 분석한다. 이때, 분석 시작점은 실험 회전판이 막 회전하기 시작하는 시점으로 설정하도록 한다. 그리고 추의 가속도를 이용해서 실험 장치 중 회전판 자체의 관성모멘트를 산출한다.
1.3.2 실험 2
회전판에 원판 시료를 올리고, 실험 1 그대로 동일하게 진행한다. 그리고 원판을 올린 상태의 관성모멘트를 산출한다.
1.3.3 실험 3
회전판에 구멍 뚫린 원판 시료를 올리고, 실험 1 그대로 동일하게 진행한다. 그리고 원환을 올린 상태의 관성모멘트를 산출한다.
2. Data & Result
2.1. 실험 1의 결과
회전 장치에 관한 실험을 3번 진행하였다. 다음 그림은 이 추가 떨어지는 것을 그래프로 나타낸 것이다. 손의 진동이나 프로그램의 색 인식 문제로 일어나는 데이터의 오염이 어디서 일어나는지 확인하는 작업을 위해서 그렸다.
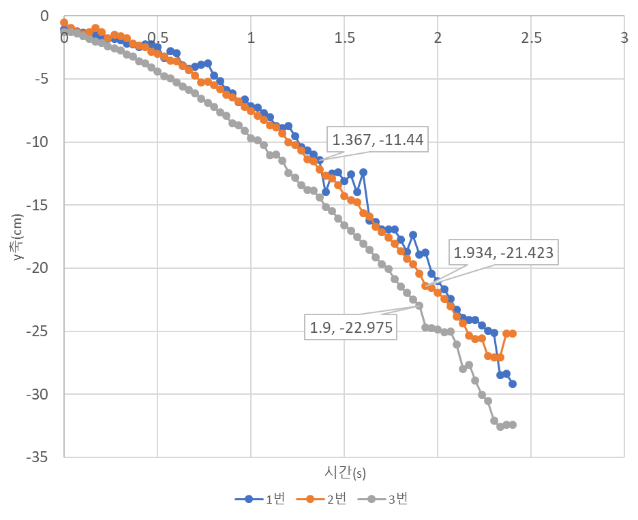
그림 2: 추의 낙하에 대한 시간-높이 그래프
어느 정도 시간 이후로 데이터의 오염도가 높아지는 모습을 볼 수 있었다.
이를 고려하여 추의 낙하운동에 대한 가속도를 산출할 수 있다. 첫 번째로, 각 프레임 사이에서 일어난 운동의 평균 가속도를 구해서 그 값들의 평균을 냈고, 두 번째로, 처음부터 각 프레임까지 전체 운동에서의 평균 가속도를 구해서 그 값들의 평균을 냈다. 그 결과는 다음과 같다. (단위는  이다.)
이다.)
1번
|
2번
|
3번
|
종합
| |
평균
|
0.1456
|
0.1114
|
0.1360
|
0.131
|
표준편차
|
0.270
|
0.0568
|
0.0708
|
표 1: 첫 번째 방법
1번
|
2번
|
3번
|
종합
| |
평균
|
0.1451
|
0.1199
|
0.1619
|
0.1423
|
표준편차
|
0.059
|
0.0172
|
0.0377
|
표 2: 두 번째 방법
이 자료를 통해 관성 모멘트를 산출하면 다음과 같은 결과가 나온다. (단위: 
1번
|
2번
|
3번
|
종합
| |
방법 1
|
0.0097
|
0.0127
|
0.0104
|
0.01093
|
방법 2
|
0.0097
|
0.0118
|
0.0087
|
0.01001
|
표 3: 표1과 표2에서 산출한 관성 모멘트
전체 종합 평균은 약 0.0105 ( 이다.
이다.
2.2. 실험 2의 결과
회전 장치 위에 원판을 올리고 실험을 3번 진행하였다. 마찬가지로 추의 낙하를 그래프로 나타냈다.
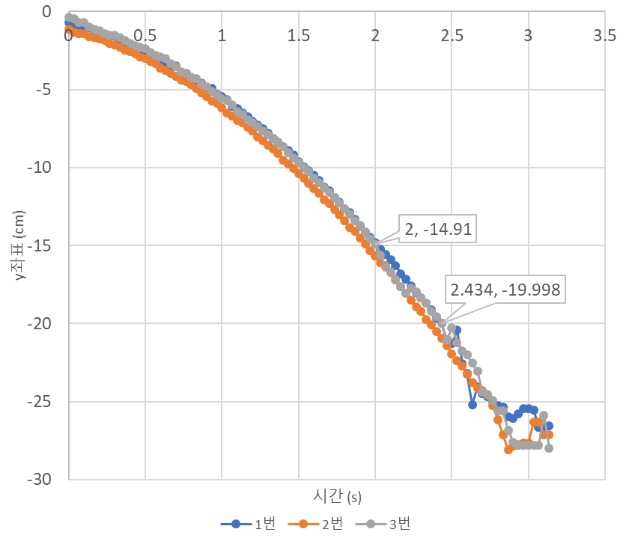
그림 3: 추의 낙하에 대한 시간-높이 그래프
이를 통해 확인한 오염된 데이터를 고려하여, 추의 낙하운동에 대한 가속도를 산출할 수 있다. 2.1에서 사용한 것과 같은 두 가지 방법을 사용하여 다음을 얻어냈다. (단위:  )
)
1번
|
2번
|
3번
|
종합
| |
평균
|
0.1092
|
0.1
|
0.1152
|
0.1081
|
표준편차
|
0.084
|
0.085
|
0.2082
|
표 4: 첫 번째 방법
1번
|
2번
|
3번
|
종합
| |
평균
|
0.1093
|
0.1137
|
0.1029
|
0.1086
|
표준편차
|
0.0206
|
0.0283
|
0.0307
|
표 5: 두 번째 방법
이 자료를 통해 관성 모멘트를 산출하면 다음과 같은 결과가 나온다.
(이때, 관성 모멘트는 회전 장치를 제외한 원판만의 관성 모멘트이다. 단위:  )
)
1번
|
2번
|
3번
|
종합
| |
방법 1
|
0.0028
|
0.0036
|
0.0018
|
0.0027
|
방법 2
|
0.0024
|
0.0019
|
0.0032
|
0.0025
|
표 6: 표4와 표5에서 산출한 관성 모멘트
전체 종합 평균은 약 0.0026 ( 이다.
이다.
2.3. 실험 3의 결과
회전 장치 위에 구멍 뚫린 원판을 올리고 실험을 3번 진행하였다. 마찬가지로 추의 낙하를 그래프로 나타냈다.
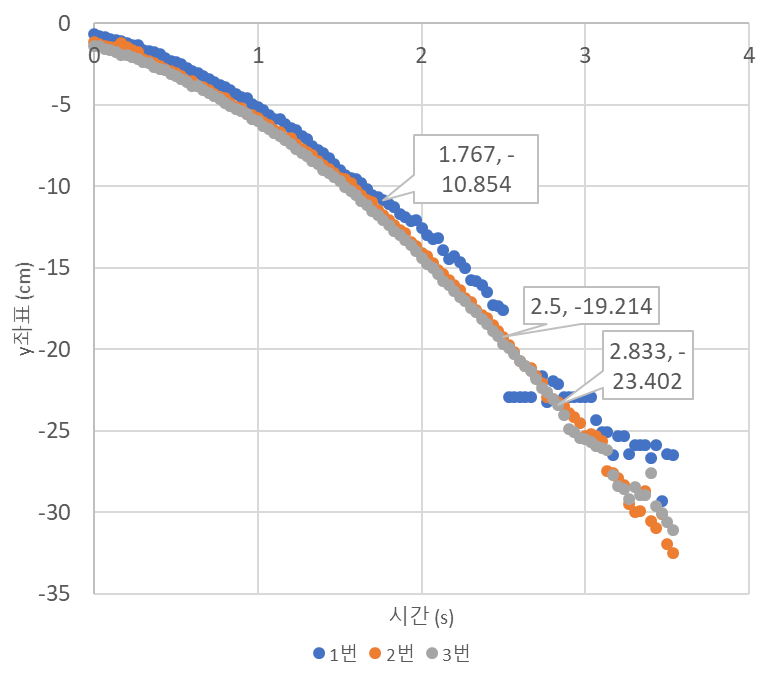
그림 4: 추의 낙하에 대한 시간-높이 그래프
이를 통해 확인한 오염된 데이터를 고려하여, 추의 낙하운동에 대한 가속도를 산출할 수 있다. 2.1에서 사용한 것과 같은 두 가지 방법을 사용하여 다음을 얻어냈다. (단위:  )
)
1번
|
2번
|
3번
|
종합
| |
평균
|
0.095
|
0.0906
|
0.0945
|
0.0934
|
표준편차
|
0.0854
|
0.0242
|
0.1282
|
표 7: 첫 번째 방법
1번
|
2번
|
3번
|
종합
| |
평균
|
0.0976
|
0.0844
|
0.0945
|
0.0922
|
표준편차
|
0.0697
|
0.0215
|
0.0231
|
표 8: 두 번째 방법
이 자료를 통해 관성 모멘트를 산출하면 다음과 같은 결과가 나온다.
(이때, 관성 모멘트는 회전 장치를 제외한 구멍 뚫린 원판만의 관성 모멘트이다. 단위:  )
)
1번
|
2번
|
3번
|
종합
| |
방법 1
|
0.0044
|
0.0051
|
0.0045
|
0.0046
|
방법 2
|
0.004
|
0.0062
|
0.0045
|
0.0049
|
표 9: 표7과 표8에서 산출한 관성 모멘트
전체 종합 평균은 약 0.0048 ( )이다.
)이다.
3. Discussion
실험 데이터에서 오차가 일어난 원인으로 여러 가지를 들 수 있었다. 그 원인으로는 정확하지 않은 길이 측정과, 공기 저항 및 마찰, 카메라 성능의 한계 등등을 들 수 있었다.
3.1. 정확하지 않은 길이 측정
좌표계 설정 당시에 자를 이용하여 길이를 설정하였는데, 자의 위치와 추의 낙하 지점 위치에 차이가 있었다. 이로 인해 추의 높이 (y좌표) 데이터에 오차가 생길 수 있었다.
위에서 진행된 실험 환경과 동일한 실험 환경에서 자와 카메라 사이의 거리가  , 추와 카메라 사이의 거리가
, 추와 카메라 사이의 거리가  라고 가정하자. 그리고 추가
라고 가정하자. 그리고 추가  로 20cm만큼 등가속도로 낙하한 거리를 카메라가 캡처한다고 하고, 이 캡처 자료를 통해 회전장치의 관성 모멘트를 산출한다고 하자.
로 20cm만큼 등가속도로 낙하한 거리를 카메라가 캡처한다고 하고, 이 캡처 자료를 통해 회전장치의 관성 모멘트를 산출한다고 하자.
(초기 속도는 0이라고 가정)
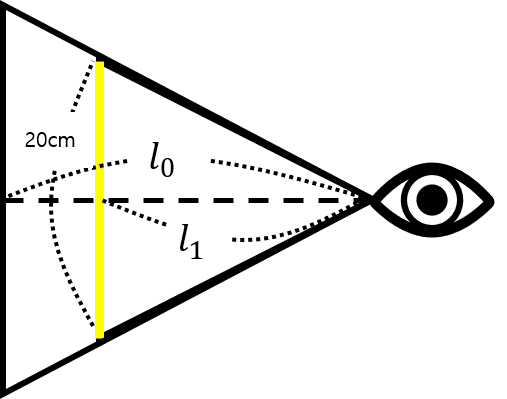
그림 5: 가정된 상황
이때,  라고 하자.
라고 하자.  에 대한 회전 장치의 관성 모멘트의 값을 다음과 같이 나타낼 수 있다.
에 대한 회전 장치의 관성 모멘트의 값을 다음과 같이 나타낼 수 있다.
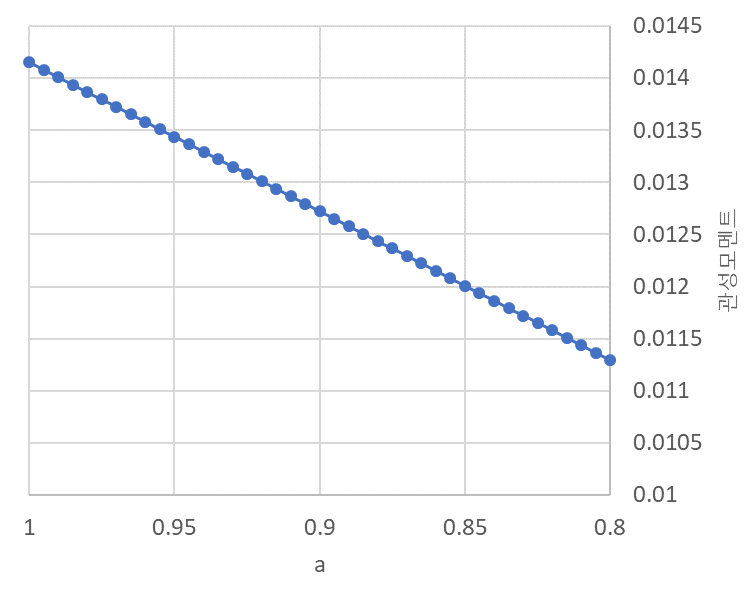
그림 6: 오차에 대한 그래프
그래프에서 볼 수 있듯이, a값이 작아지면, 즉 추와 자 사이의 거리가 상대적으로 멀어질수록 회전장치의 관성모멘트의 값이 작게 산출되는 것을 확인할 수 있었다.
위 실험에서는, a값이 상대적으로 1에 가까웠으나, 오차를 일으킬 만한 요소가 될 수는 있었다.
3.2. 공기 저항 및 마찰
추가 떨어지면서 공기 저항과 공기에 대한 마찰력을 받는 등, 여러 가지 부가적인 힘을 받아 데이터에 오차를 일으킬 수 있었다.
3.3. 카메라와 프로그램 성능의 한계
카메라가 오작동을 일으켜 같은 프레임을 중복해서 촬영하는 일이 일어나는 것을 확인할 수 있었으며, 프로그램이 캡처 자료를 분석하는 도중 색 인식을 잘못하는 모습도 확인할 수 있었다. 이는 특히 촬영 배경으로 설정한 흰 종이에서 추가 벗어났을 때 자주 일어났으며, 그때의 데이터 오염도는 지나치게 심각한 관계로 그 부분을 제거해서 분석을 진행할 수밖에 없었다.
3.4. 카메라의 평형
좌표계를 설정할 때, 카메라가 기울지 않은 상태에서 이를 진행해야 하나, 카메라를 완벽하게 똑바로 세운 상태에서 좌표계를 설정하는 것은 불가능했다.
기울어진 카메라 또한 데이터에 크고 작은 오차를 일으키기에는 충분하다고 판단했다.
4. Conclusion
실험을 통해 관성 모멘트에 대한 이론을 확인하였다. 실험 1에서는 회전 장치와 도르래, 그리고 추를 이용하여 회전 장치 자체의 관성 모멘트를 구해냈다. 실험 2에서는 회전 장치 위에 원판 시료를 설치하여 원판 시료의 관성 모멘트를 구해냈다. 실험 3에서는 회전 장치 위에 구멍이 뚫린 원판 시료를 설치하여, 그 시료의 관성 모멘트를 구해냈다.
원판 시료와 구멍 뚫린 원판 시료에 대한 이론적인 관성 모멘트 값은 다음과 같다.
① 원판 시료: 질량- 608g, 반경- 9cm
② 구멍 뚫린 원판 시료:
질량-610g, 전체 반경 – 9cm, 구멍 반경 – 8cm
이는 실험을 통해 얻은 값인 0.0026, 그리고 0.0048과 유사한 값이었다.
하지만 이론값과 어느 정도 차이를 보였는데, 이를 유발한 오차의 원인을 분석하였다.
우선, 추와 자 사이의 거리를 꼽을 수 있었다. 프로그램이 추의 높이 (또는 y좌표)를 측정할 때, 추와 자 사이의 거리가 원근의 차이에 의한 오차를 일으킬 수 있었다고 결론을 내렸다.
또, 추에 대한 공기 저항과 마찰력의 영향을 꼽을 수 있었다.
카메라와 프로그램의 성능 한계에 대해서도 논의할 수밖에 없었다. 실험 도중, 카메라가 중복된 프레임을 촬영하는 일을 목격하였고, 프로그램이 색 인식을 잘못하여 엉뚱한 지점을 물체의 위치로 인식하는 것 또한 목격했다. 이는 데이터에 어느 정도 오차를 일으키기 충분할 수 있었을 것이라고 판단하였다.
마지막으로, 카메라의 평형 상태 또한 오차의 원인으로 지목할 수 있었다. 좌표계 설정 당시 카메라가 기울어진 채 설정이 이뤄진 것이 오차를 일으킬 수 있었을 것이라고 판단하였다.
이러한 오차에도 불구하고 실험을 통해 얻어낸 관성 모멘트 값은 이론에 의해 계산된 값과 어느 정도 유사하다는 것을 확인할 수 있었으므로, 평행축 정리나 토크에 관한 이론 등을 확인하기에는 충분하였다고 판단하였다.
* Reference
1 서울대학교 물리천문학부, 『실험 1-2. 관성모멘트 측정』, 2015, 4